|
I am a Ph.D. student at the CMU Robotics Institute. Previously, I received my Bachelor's degree in Computer Science from Peking University. During my undergrad years, I have been fortunate to work with Prof. Yue Wang, Prof. Marco Pavone, Prof. Meng Jiang, and Prof. He Wang. My research interest spans Robotics, 3D Computer Vision and Machine Learning. My research objective is to endow embodied agents working in complex real-world scenes with generalizable sensorimotor capabilities. How to pronounce my first name?
To approximate: replace the letter "x" with "sh". I also go by Gavin.
Email / GitHub / Google Scholar / Twitter |

Click for domain randomization
|

|
*: Equal contributions; †: Corresponding author |
|
Yuxuan Kuang*, Haoran Geng*, Amine Elhafsi, Tan-Dzung Do, Pieter Abbeel, Jitendra Malik, Marco Pavone, Yue Wang Paper / Project / Code arXiv preprint, 2025. |
|
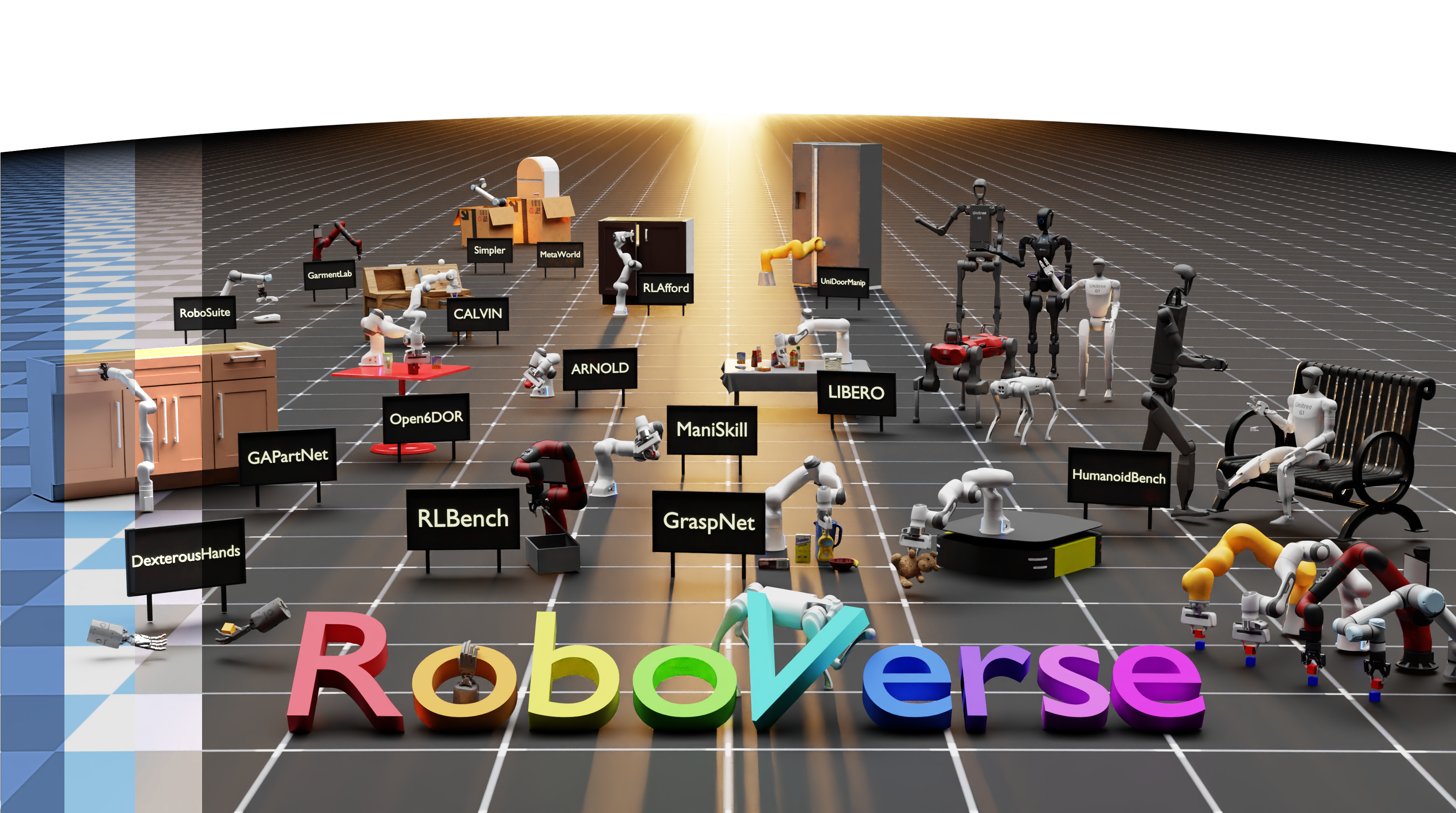
RoboVerse Team Paper / Project / Code Robotics: Science and Systems (RSS), 2025. (Oral Presentation) |

|
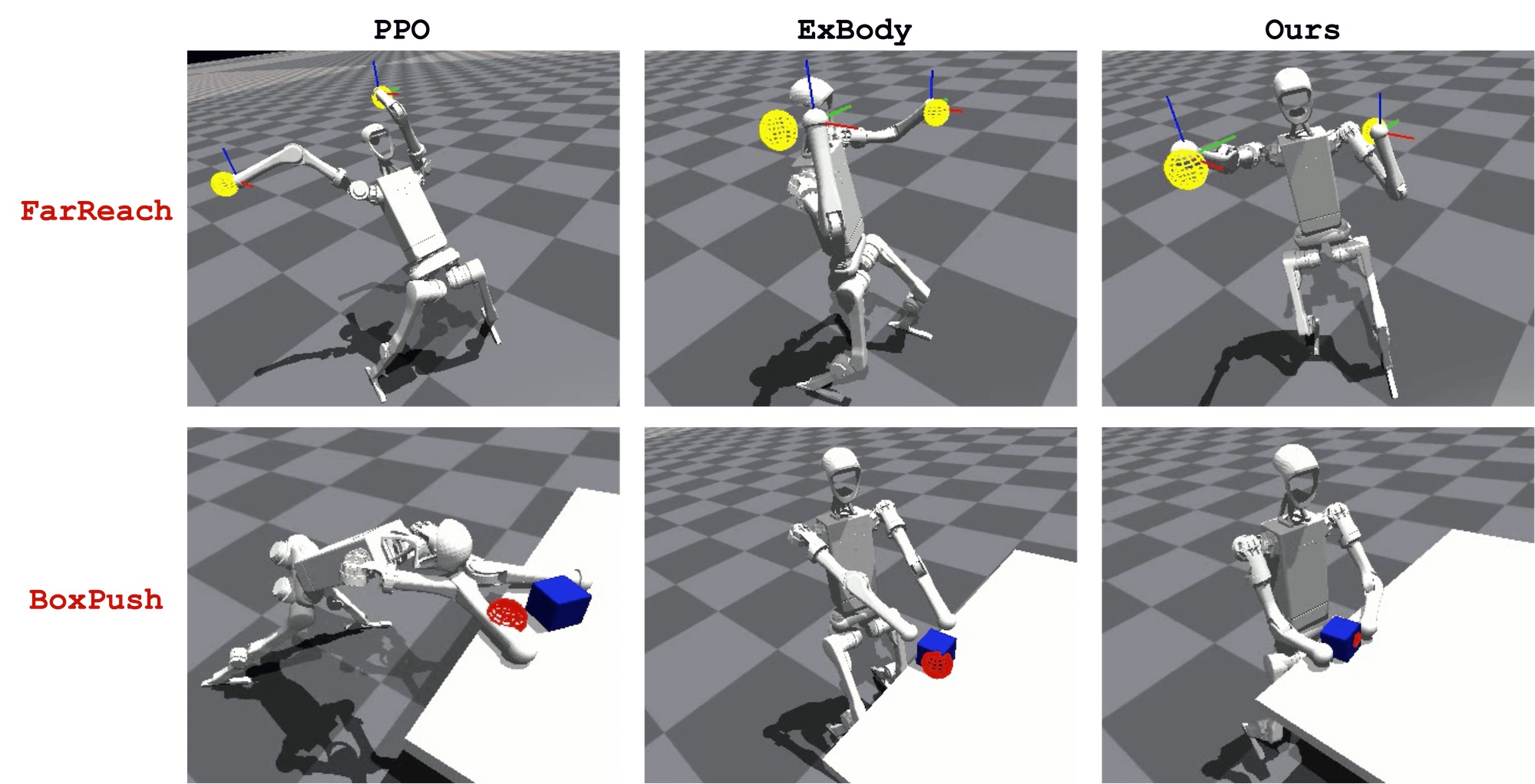
Weiheng Liu*, Yuxuan Wan*, Jilong Wang, Yuxuan Kuang, Wenbo Cui, Xuesong Shi, Haoran Li, Dongbin Zhao, Zhizheng Zhang†, He Wang† Paper / Project / Code Conference on Robot Learning (CoRL), 2025. (Oral Presentation) |

|
Rongtao Xu*, Jian Zhang*, Minghao Guo*, Youpeng Wen*, Haoting Yang, Min Lin, Jianzheng Huang, Zhe Li, Kaidong Zhang, Liqiong Wang, Yuxuan Kuang, Meng Cao, Feng Zheng†, Xiaodan Liang† Paper / Project / Code International Conference on Computer Vision (ICCV), 2025. |

|
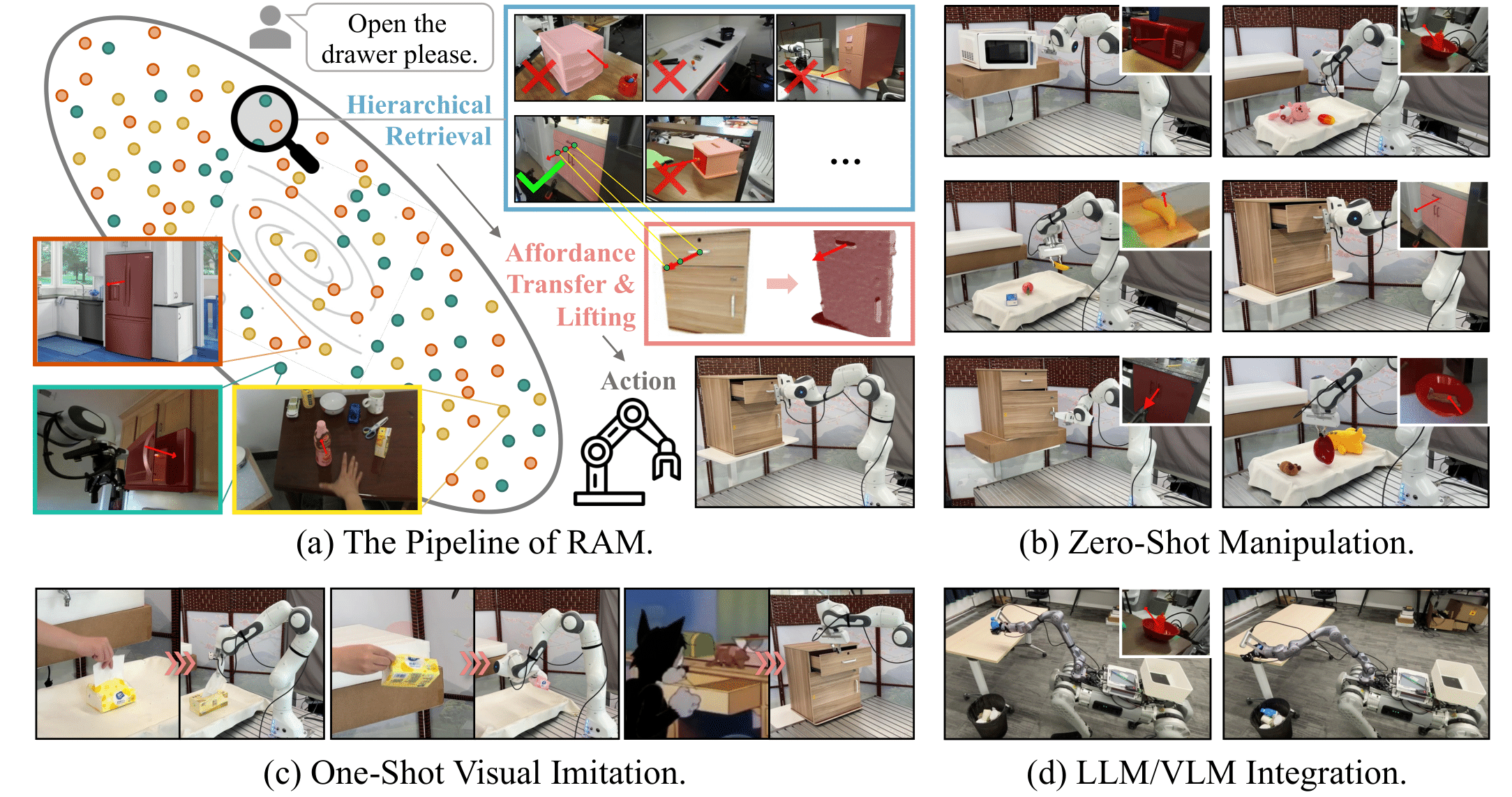
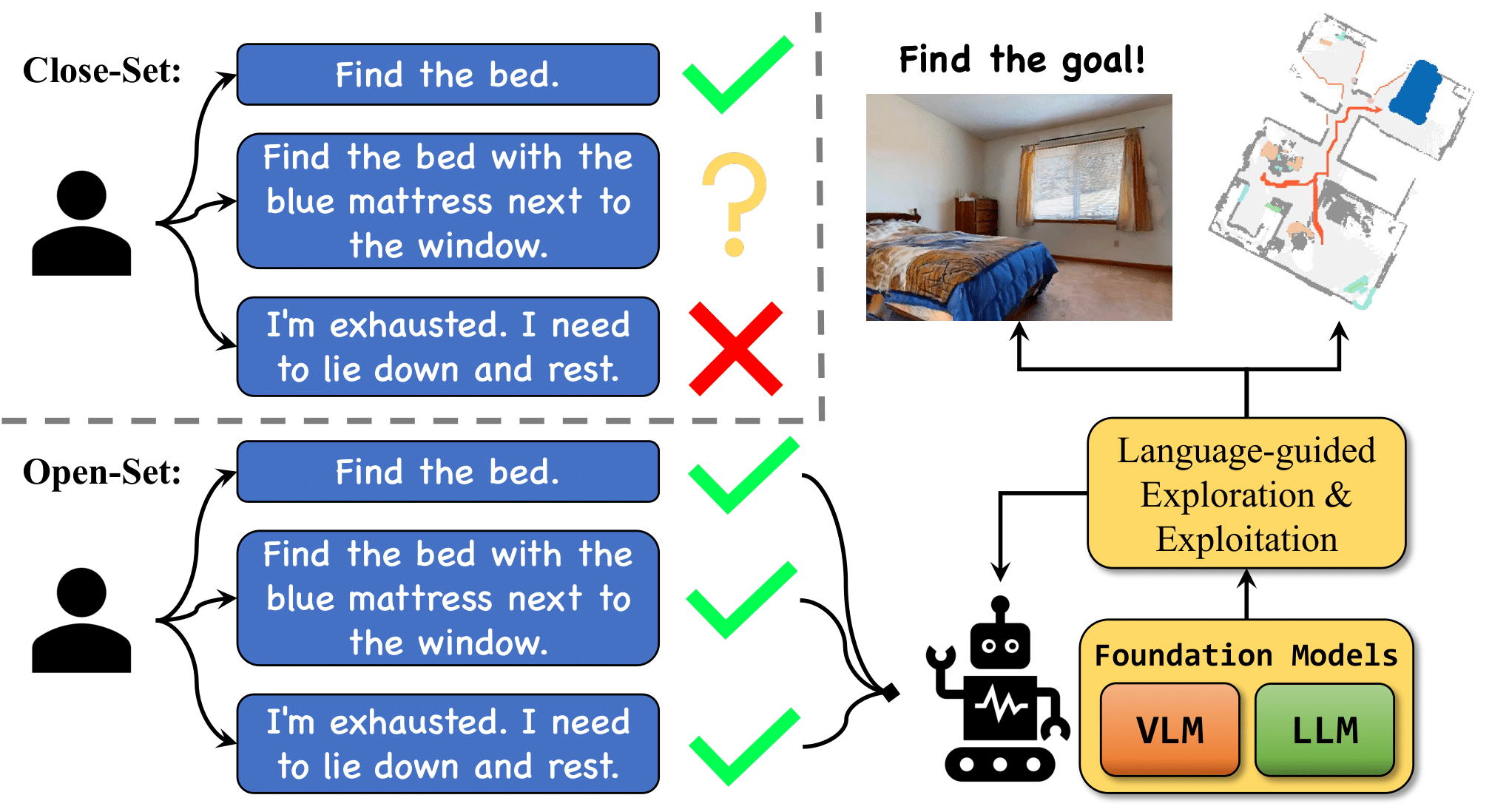
Yuxuan Kuang*, Junjie Ye*, Haoran Geng*, Jiageng Mao, Congyue Deng, Leonidas Guibas, He Wang, Yue Wang Paper / Project / Code Conference on Robot Learning (CoRL), 2024. (Oral Presentation, 4.5% acceptance rate) |
|
Yuxuan Kuang, Hai Lin, Meng Jiang Paper / Project / Code Findings of Annual Conference of the North American Chapter of the Association for Computational Linguistics (NAACL), 2024. |
|
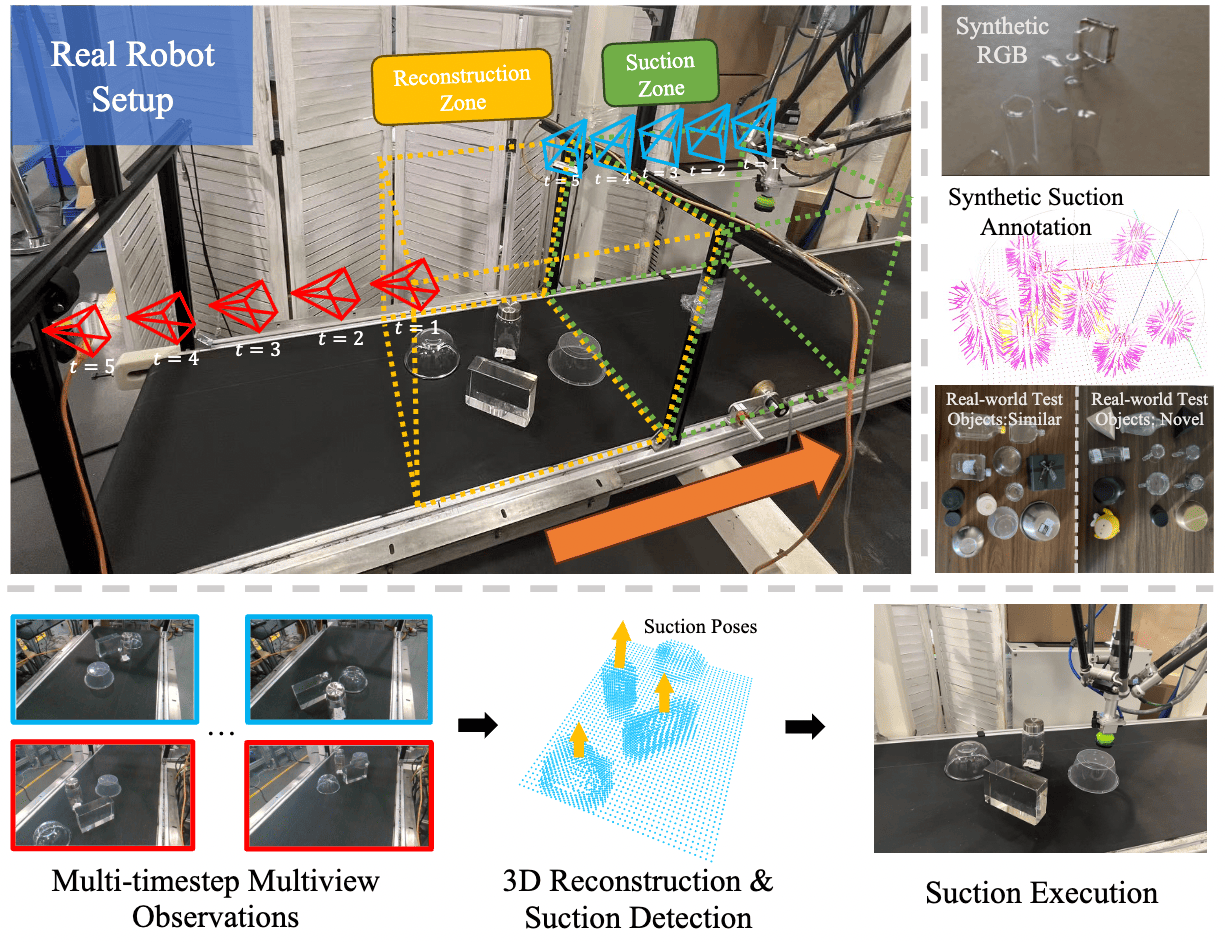
Yuxuan Kuang*, Qin Han*, Danshi Li, Qiyu Dai, Lian Ding, Dong Sun, Hanlin Zhao, He Wang† Paper / Project / Code International Conference on Robotics and Automation (ICRA), 2024. (Oral Presentation) |
|
|
|
|
|
|
|
|
|
Last updated in August 2025.
|